La nuit, incline ta montre d'écolier pour en mieux distinguer les aiguilles. À la lueur de l'obscurité, elles te révèleront tous les produits scalaires.
On rencontre parfois des produits scalaires étonnants. Dans le plan, une expression comme \begin{equation} xx' + (x-y)(x'-y') \label{expression} \end{equation} où $(x,y)$ et $(x',y')$ désignent deux vecteurs quelconques de $\mathbb{R}^2$, en est un exemple. Au-delà de l'exercice classique de CAPES ou de classe préparatoire 12, remontons son mécanisme d'une manière qui convoque aussi les arts. Nous nous appuierons pour cela sur les seuls éléments de géométrie enseignés en première & terminale STD2A 34 — essentiellement la perspective axonométrique et les coniques, et redécouvrirons incidemment, certes dans un contexte resserré mais très concret, une propriété relative aux formes quadratiques : leur orthogonalisation conjointe 5.
Angles droits de travers, produits scalaires de guingois
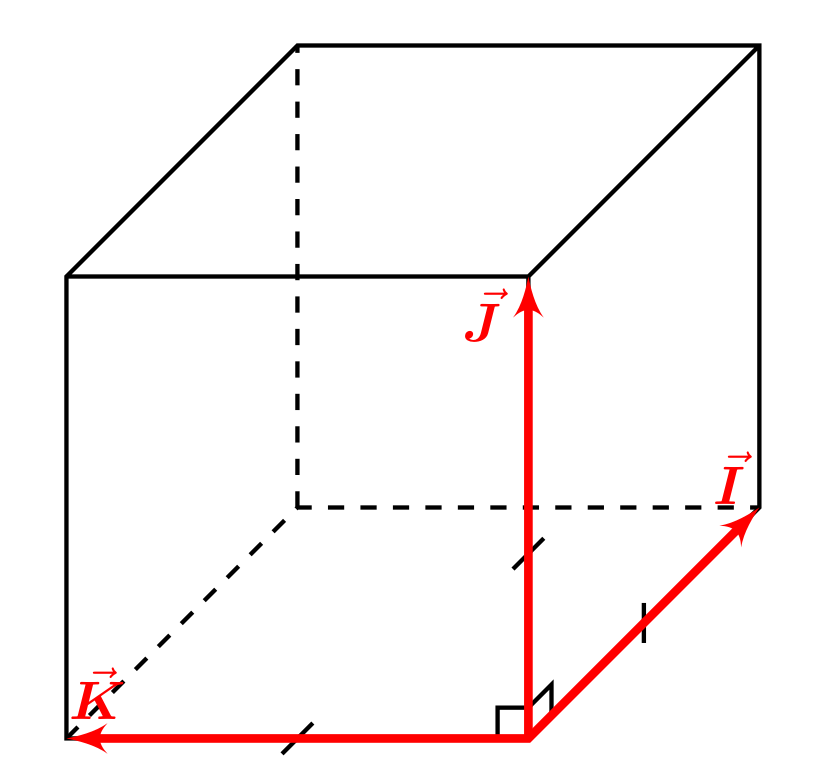
Quand on vous dit que ces deux vecteurs $\vec{I}$, $\vec{J}$ forment un couple orthonormé, vous ne nous croyez pas :
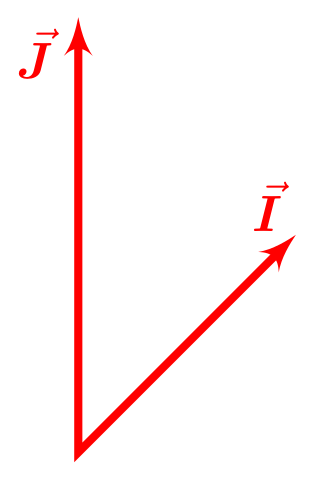
Mais quand on vous explique qu'ils mettent en perspective cavalière 67 deux arêtes d'un cube unité dont le tracé à plat figure ci-dessous, les longueurs vous paraîtront normées, et l'angle vous semblera bien droit.
Techniquement, le plan $(\vec{I},\vec{J})$ de l'espace tridimensionnel a subi une projection oblique sur le plan du tableau8 (ou de la feuille, ou de l'écran), rapporté à sa base orthonormée canonique $(\vec{\imath},\vec{\jmath})$, figure 3. Le vecteur $\vec{I}$ y est représenté par le vecteur $a \vec{\imath} + b \vec{\jmath}$ (avec ici $a>0$ et $b>0$), et le vecteur $\vec{J}$ par le vecteur $\vec{\jmath}$. Plus généralement, le vecteur $X\vec{I}+Y\vec{J}$ est représenté par le vecteur $aX\vec{\imath}+(bX+Y)\vec{\jmath}$.
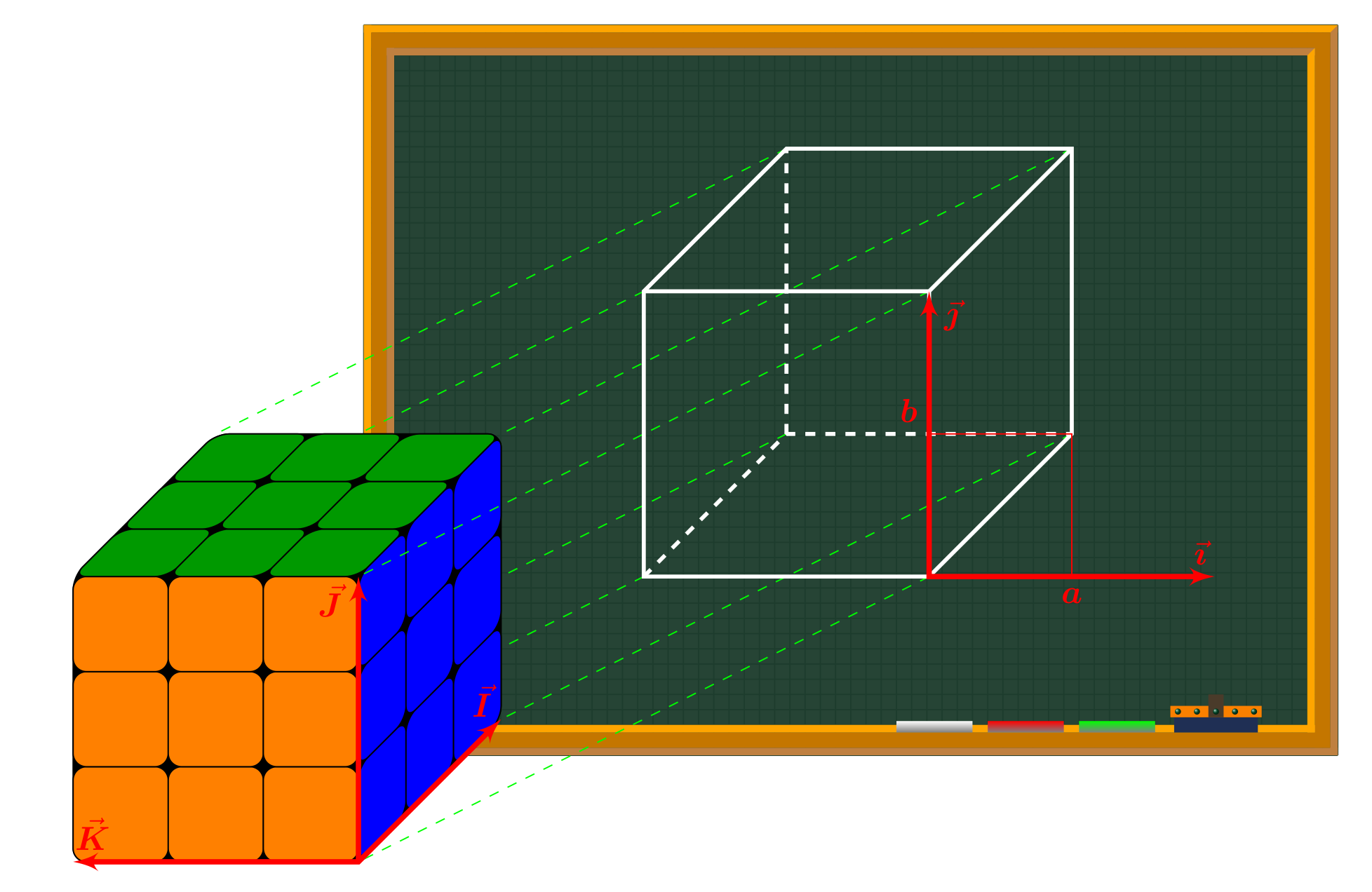
À cause des limites du dessin, l'objet (le cube lui-même) a été représenté en perspective ; il faut cependant s'imaginer un volume.
Réciproquement, un vecteur $x\vec{\imath} +y\vec{\jmath}$ peut s'interpréter comme résultat de l'écrasement d'un certain vecteur $X\vec{I} +Y\vec{J}$ du plan $(\vec{I},\vec{J})$ sur le plan du tableau. Pour déterminer lequel, on inverse le système : $$ \left\{ \begin{aligned} x &= aX \\ y &= bX+Y \end{aligned} \right. $$ en $$ \left\{ \begin{aligned} X &= \frac{x}{a} \\ Y &= y-b\frac{x}{a} \end{aligned} \right.\;\,. $$ Il peut dès lors faire sens de définir le produit scalaire entre les vecteurs $x\vec{\imath} +y\vec{\jmath}$ et $x'\vec{\imath} +y'\vec{\jmath}$ du plan du tableau par référence à ce qu'était leur produit scalaire canonique avant d'être projetés. Soit :
\begin{align*} \langle x\vec{\imath} +y\vec{\jmath} \lvert x'\vec{\imath} +y'\vec{\jmath} \rangle &=XX'+YY' \\ &= \frac{xx'}{a^2} + \Big(y-\frac{bx}{a}\Big)\Big(y'-\frac{bx'}{a}\Big). \end{align*}
On comprend mieux d'où proviendraient l'expression (\ref{expression}) et ses nombreuses variantes, à première vue « tordues », et pourquoi elles définissent effectivement des produits scalaires.
Orthogonalisation simultanée pour deux produits scalaires
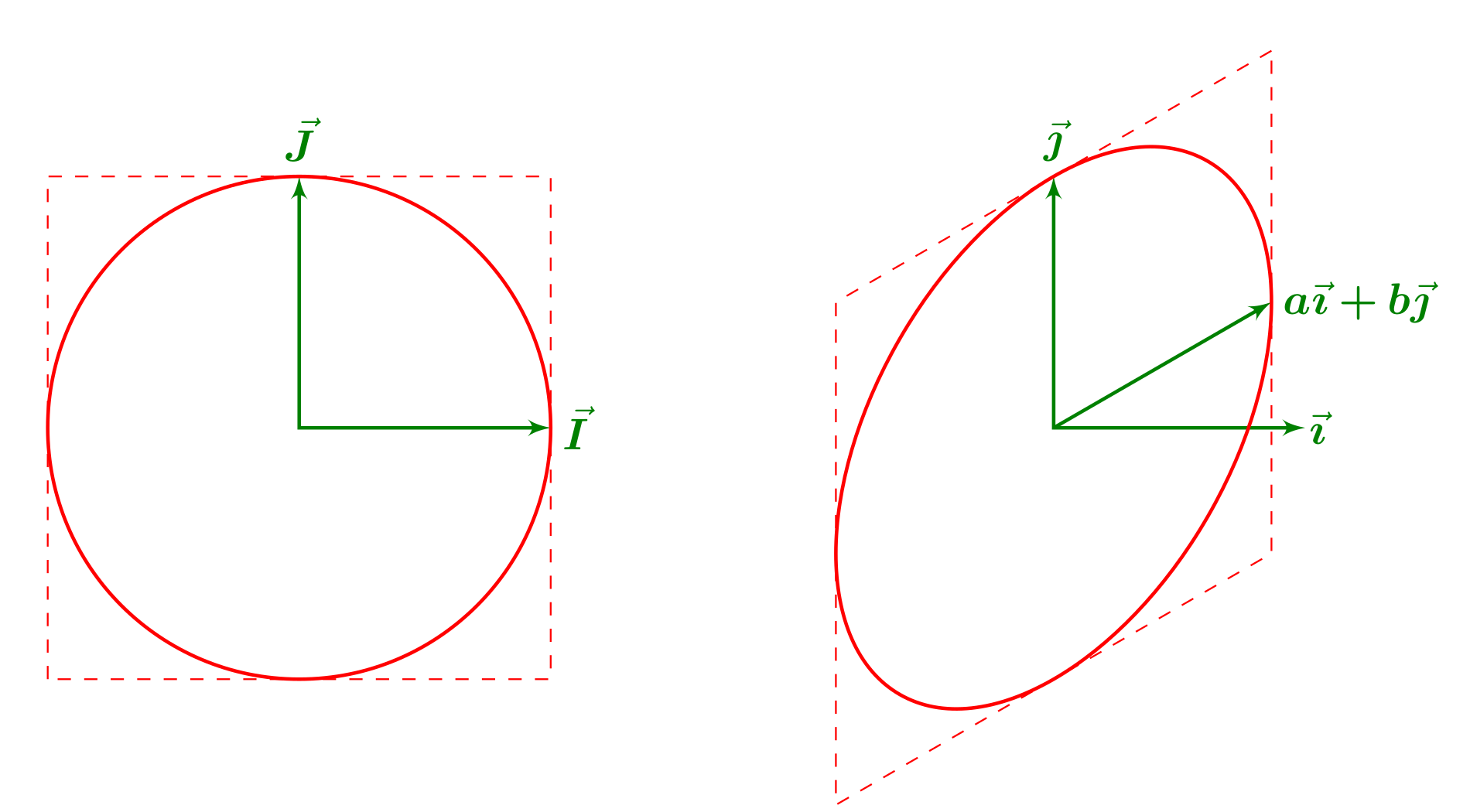
Allons plus loin. Sous l'effet de la projection, le cercle unité du plan $(\vec{I},\vec{J})$ de l'espace tridimensionnel devient une ellipse, figure 4. Image de l'arc $$\theta \rightarrow (X=\cos(\theta),Y=\sin(\theta)),$$ cette dernière admet le paramétrage suivant dans le plan du tableau : $$ \left\{\begin{aligned} x &= a\cos(\theta) \\ y &= b\cos(\theta)+\sin(\theta) \end{aligned}\right.\;\,\theta\in[0,2\pi].$$
Choisissons une base naturellement orthonormée dans le plan $(\vec{I},\vec{J})$, constituée des vecteurs génériques $$ \vec{U}_{\theta} = \cos(\theta)\vec{I} + \sin(\theta)\vec{J} \text{ et } \vec{V}_{\theta} = -\sin(\theta)\vec{I} + \cos(\theta)\vec{J}. $$ Dans le plan du tableau, les vecteurs $\vec{U}_{\theta}$ et $\vec{V}_{\theta}$ sont représentés par les vecteurs $$ \vec{u}_{\theta}=a\cos(\theta)\vec{\imath}+(b\cos(\theta)+\sin(\theta))\vec{\jmath} $$ et $$\vec{v}_{\theta} = -a\sin(\theta)\vec{\imath}+(-b\sin(\theta)+\cos(\theta))\vec{\jmath}. $$
À mesure que $\theta$ progresse, les vecteurs $\vec{U}_{\theta}$, $\vec{V}_{\theta}$ tournent d'équerre tandis que les vecteurs $\vec{u}_{\theta}$, $\vec{v}_{\theta}$ balayent l'ellipse en se déformant plus ou moins tels deux aiguilles d'une montre ovale 9. Une animation JavaScript/JSXGraph conçue pour l'occasion sur le site CultureMath en fait une démonstration convaincante. Il semble même qu'en certaines positions précises, les deux bases paraissent orthogonales (au sens usuel du terme). Voyons pourquoi et donnons-en l'interprétation en regard de la théorie (beaucoup plus aérienne) des formes quadratiques...
À $\theta=0$, et sous les conditions $a>0$ et $b>0$ adoptées dans les illustrations, les vecteurs $\vec{u}_{0} = a\vec{\imath} + b\vec{\jmath}$ et $\vec{v}_{0}=\vec{\jmath}$ délimitent un angle aigu, tandis qu'à $\theta=\frac{\pi}{2}$ les vecteurs $\vec{u}_{\frac{\pi}{2}} = \vec{\jmath}$ et $\vec{v}_{\frac{\pi}{2}}=-a\vec{\imath} - b\vec{\jmath}$ s'ouvrent et délimitent un angle obtus. Par des arguments de continuité10, il existe une valeur intermédiaire $\theta_0$ de $\theta$ pour laquelle l'angle délimité sera droit. Ce qui signifie qu'avec cette valeur particulière $\theta_0$, les vecteurs $\vec{u}_{\theta_0}$ et $\vec{v}_{\theta_0}$ forment, dans le plan $(\vec{\imath},\vec{\jmath})$, à la fois une base orthonormée pour le produit scalaire « tordu » $\langle\cdot\lvert\cdot\rangle$ et une base orthogonale pour le produit scalaire canonique. On parle d'orthogonalisation simultanée.
Lien entre la co-orthogonalisation et les axes principaux de l'ellipse
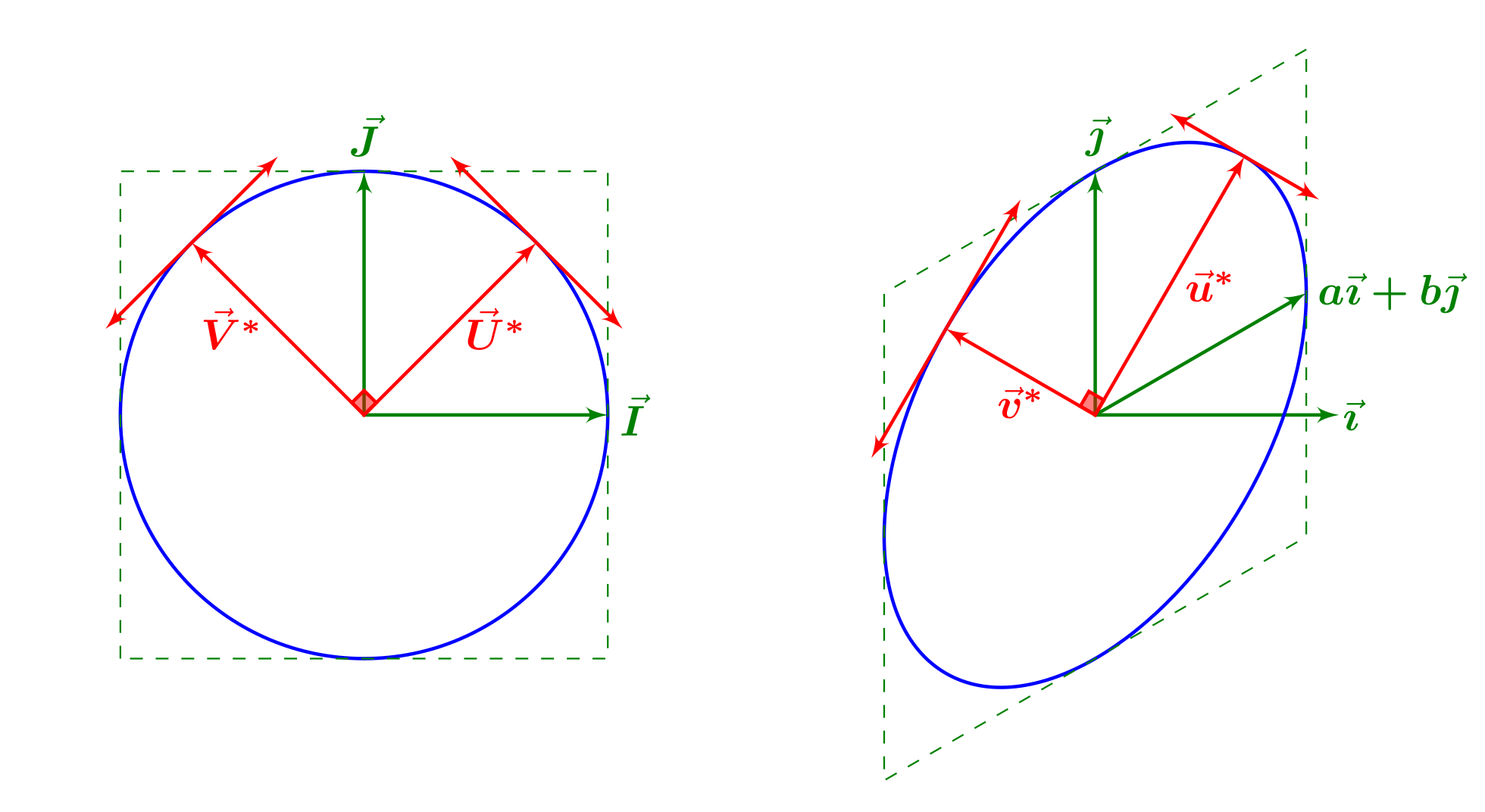
Allons encore plus loin, toujours sans calcul. Il y a de bonnes raisons pour que les vecteurs $\vec{u}_{\theta_0}$ et $\vec{v}_{\theta_0}$ correspondent, à l'ordre et aux signes près, aux demi-grands et demi-petits axes $\vec{u}^*$ et $\vec{v}^*$ de l'ellipse, figure 5. En effet, ces deux vecteurs sont d'ores et déjà orthogonaux pour le produit scalaire canonique du plan $(\vec{\imath},\vec{\jmath})$. De plus, chacun d'eux est parallèle à la tangente à l'ellipse sur lequel s'appuie l'autre. Ces parallélismes se retrouvent à la source, par la bijection linéaire entre les plans $(\vec{I},\vec{J})$ et $(\vec{\imath},\vec{\jmath})$. Aussi, les antécédents $\vec{U}^*$ et $\vec{V}^*$ de $\vec{u}^*$ et $\vec{v}^*$ et les directions des tangentes sur lesquelles ils s'adossent jouissent des mêmes propriétés. Un rayon étant normal à son cercle, nécessairement $\vec{U}^*$ et $\vec{V}^*$ sont orthogonaux (et même normés) dans le plan $(\vec{I},\vec{J})$. Par ricochet, $\vec{u}^*$ et $\vec{v}^*$ sont orthogonaux (et même normés) dans le plan $(\vec{\imath},\vec{\jmath})$ muni du produit scalaire « tordu » $\langle\cdot\lvert\cdot\rangle$.
Concluons en indiquant que les raisonnements tenus ici sur des perspectives cavalières s'étendent à n'importe quelle projection cylindrique 6, donnant alors naissance, sur $\mathbb{R}^2$, aux formes quadratiques plus générales $$ q(x,y)= (\alpha x + \beta y)^2 + (\gamma x + \delta y)^2. $$